

Materialannahme- und Pulverzufuhrprozess
Schnelle und effiziente Annahme und Lieferung von Materialien
Schnelle und effiziente Annahme und Lieferung von Materialien
Automatisches Sacköffnungssystem
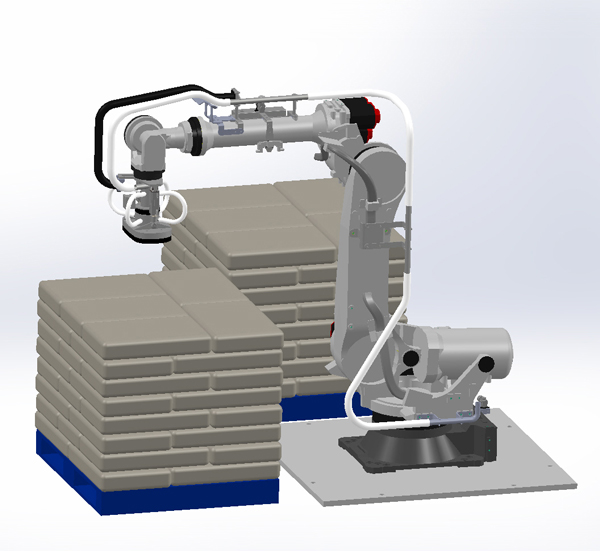
Depalettierer Roboter (DPL)
Ein automatisiertes Fördersystem mit speziellem Saugmechanismus und kartesischem Koordinatenantrieb für eine schnelle Sackzufuhr
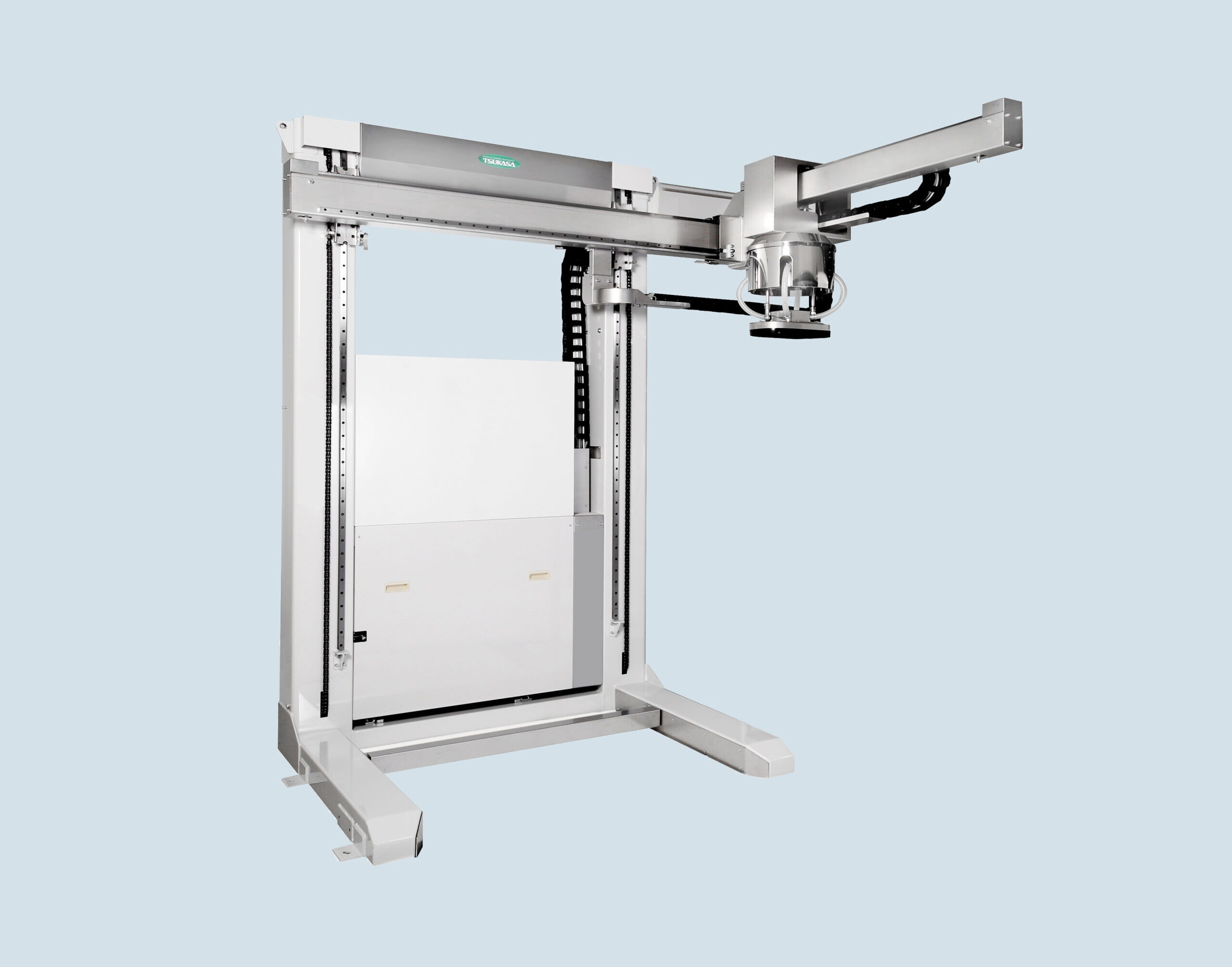
Merkmale
⚫︎Auf Paletten gestapelte Papiersäcke werden durch den speziellen Saugmechanismus automatisch zum nächsten Prozess befördert.
⚫︎Der Arm auf der Basis eines kartesischen Koordinatensystems arbeitet sicher innerhalb des Bereichs einer einzelnen Palette – maximale Sicherheit bei minimalem Platzbedarf. Für den Betrieb mit mehreren Paletten sind Gelenkrobotermodelle verfügbar.
⚫︎Die Touchpanel-Steuerung ermöglicht eine einfache Registrierung und Änderung von Palettenstapelmustern.
⚫︎Der optionale Depalettierer Roboter PV mit fortschrittlicher Bilderkennung erkennt Sackpositionen präzise – ganz ohne vorheriges Einlernen.
⚫︎Der Arm auf der Basis eines kartesischen Koordinatensystems arbeitet sicher innerhalb des Bereichs einer einzelnen Palette – maximale Sicherheit bei minimalem Platzbedarf. Für den Betrieb mit mehreren Paletten sind Gelenkrobotermodelle verfügbar.
⚫︎Die Touchpanel-Steuerung ermöglicht eine einfache Registrierung und Änderung von Palettenstapelmustern.
⚫︎Der optionale Depalettierer Roboter PV mit fortschrittlicher Bilderkennung erkennt Sackpositionen präzise – ganz ohne vorheriges Einlernen.
Das Beispiel der Installation
Kontinuierliches Öffnen einer Sackart
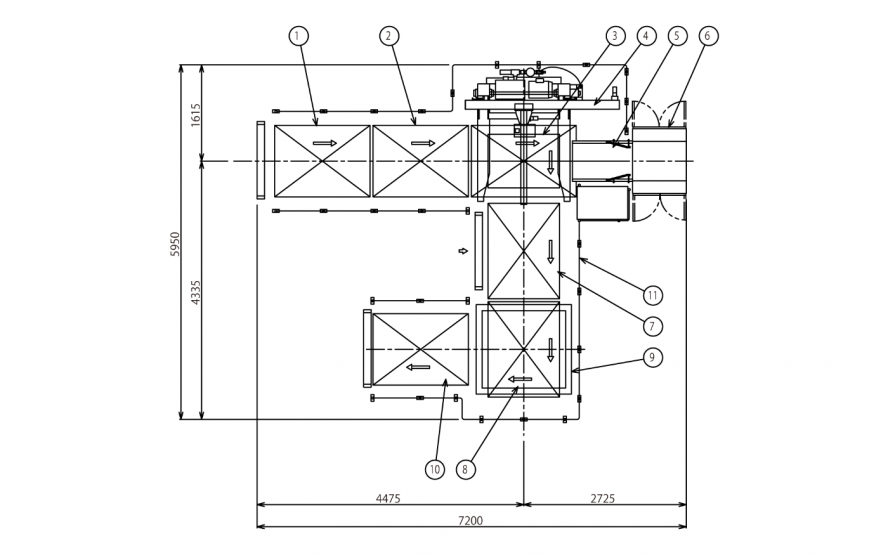
1. Palettenförderer
2. Palettenförderer
3. Depalettierer Orthogonal-Förderer
4. Depalettierer
5. Eingangsförderer
6. PowOpener
7. Palettenförderer
8. Förderband für Lagersystem
9. Palettenlagersystem
10. Palettenförderer
11. Sicherheitsgitter
2. Palettenförderer
3. Depalettierer Orthogonal-Förderer
4. Depalettierer
5. Eingangsförderer
6. PowOpener
7. Palettenförderer
8. Förderband für Lagersystem
9. Palettenlagersystem
10. Palettenförderer
11. Sicherheitsgitter
Öffnen verschiedener Sackarten
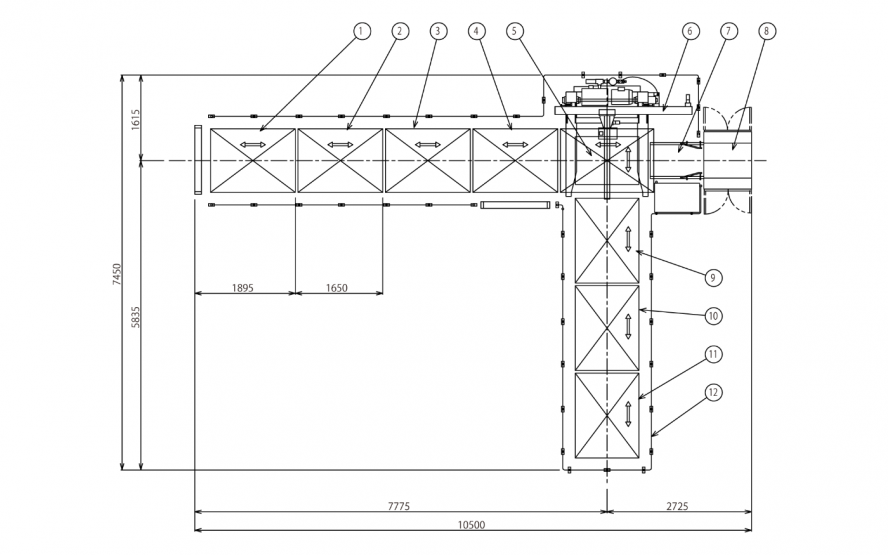
1. Palettenförderer
2. Palettenförderer
3. Depalettierer Orthogonal-Förderer
4. Depalettierer
5. Eingangsförderer
6. PowOpener
7. Palettenförderer
8. Förderband für Lagersystem
9. Palettenlagersystem
10. Palettenförderer
11. Sicherheitsgitter
2. Palettenförderer
3. Depalettierer Orthogonal-Förderer
4. Depalettierer
5. Eingangsförderer
6. PowOpener
7. Palettenförderer
8. Förderband für Lagersystem
9. Palettenlagersystem
10. Palettenförderer
11. Sicherheitsgitter
Spezielle Spezifikationen
Spezifikation des Gelenkroboters
⚫︎Ein Knickarmroboter transportiert Rohmaterialien von mehreren Paletten.
⚫︎Reagiert auf verschiedene Layouts.
⚫︎Reagiert auf verschiedene Layouts.
Entpalettierroboter mit visuellem Erkennungssystem PowVision
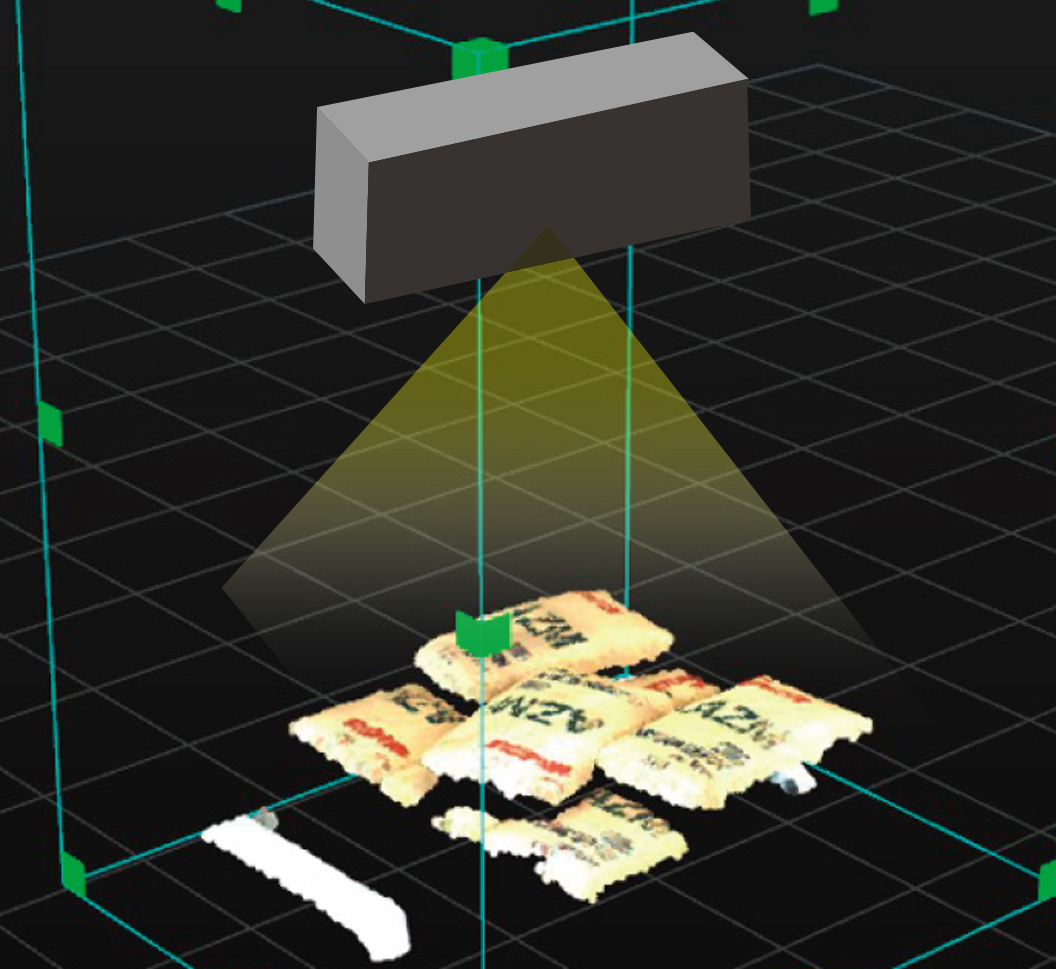
⚫︎Während der Zuführung der Rohstoffsäcke zum automatischen Öffnungssystem werden die Position, Höhe und Ausrichtung der Säcke auf einer Palette von der 3D-Vision-Kamera genau erkannt.
⚫︎Bediener müssen keine Säcke stapeln oder Muster auswählen.
⚫︎Bediener müssen keine Säcke stapeln oder Muster auswählen.


