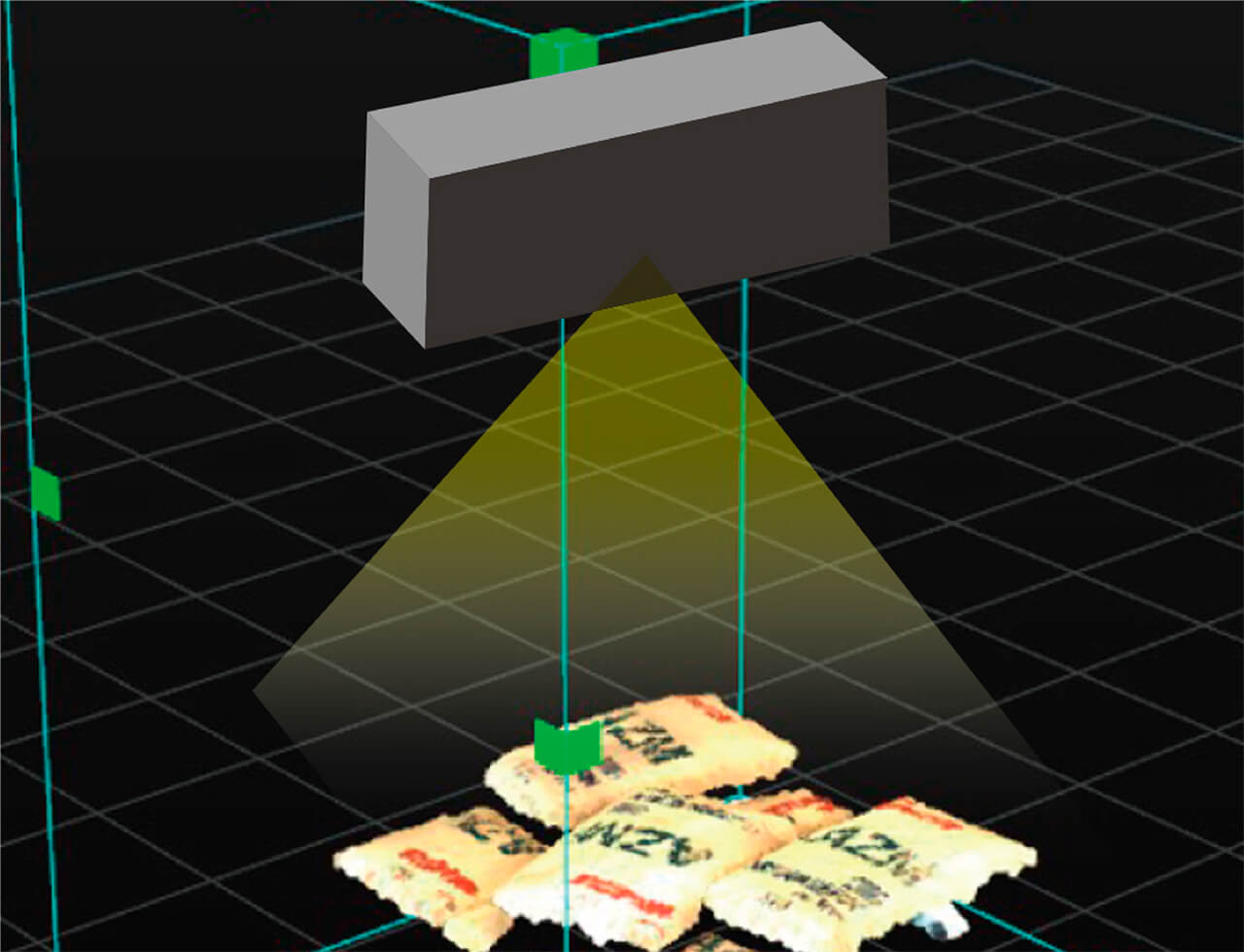
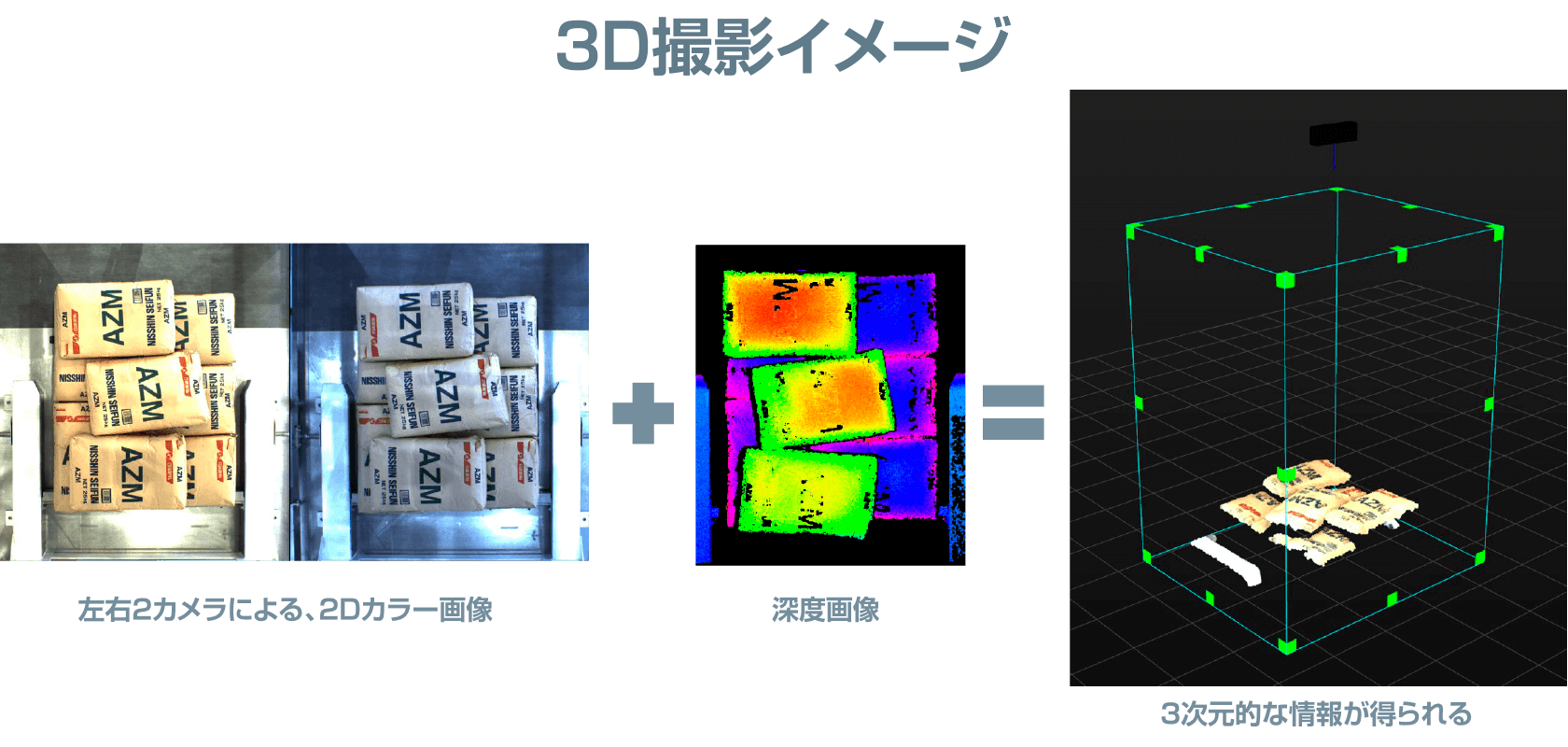
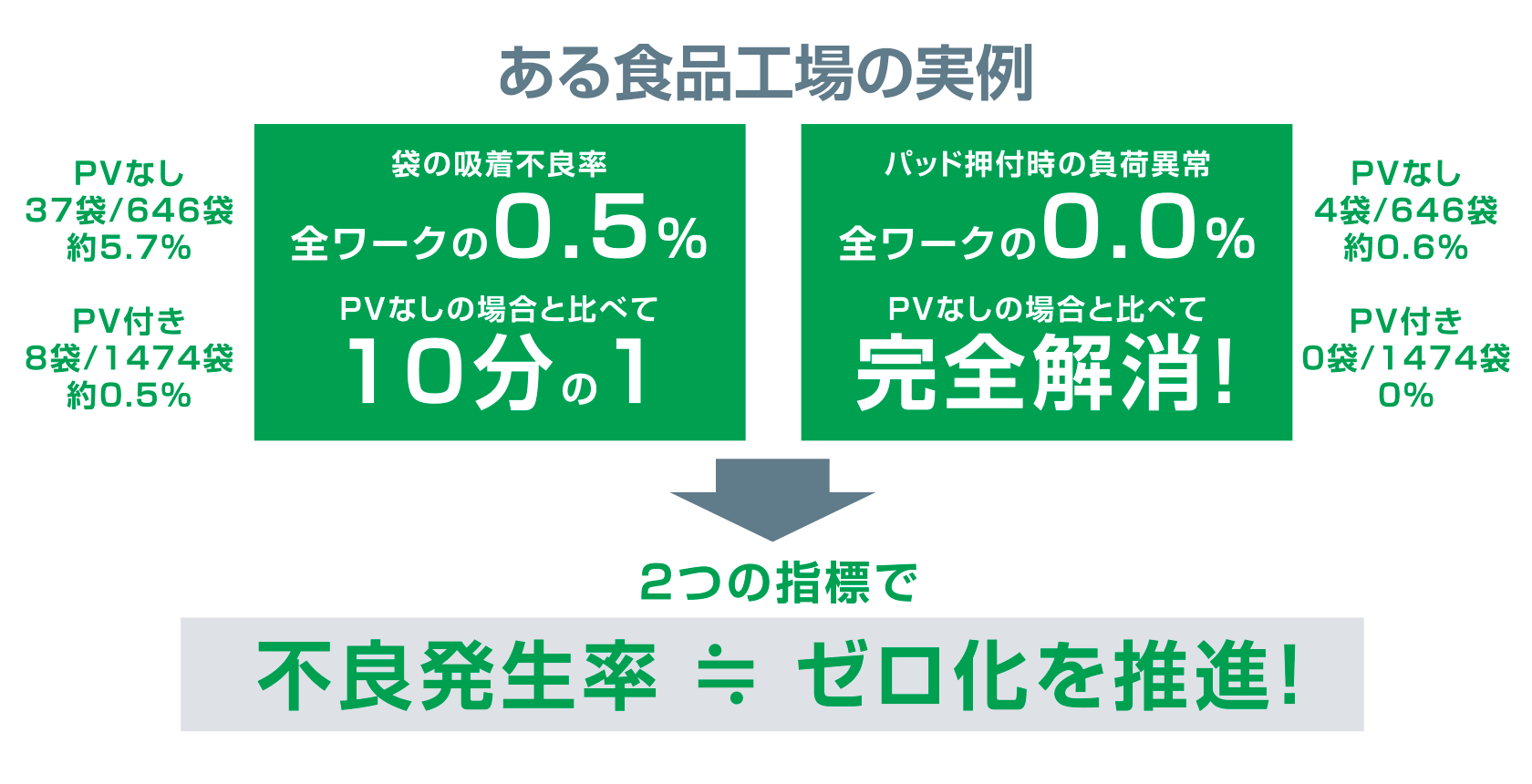
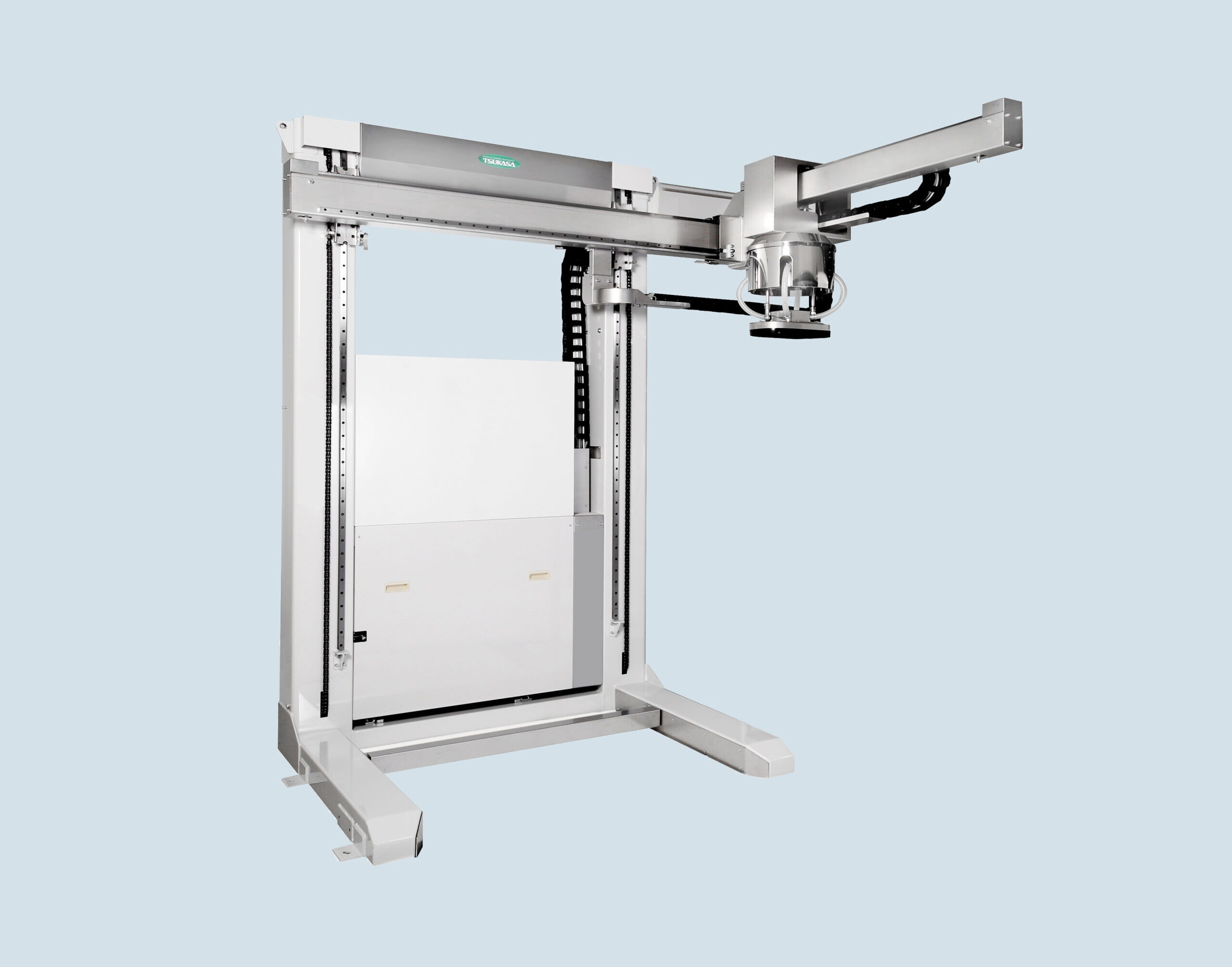
パウビジョンシステムPVチェッカー 誤投入防止システム PVレコグナイザー 最適ワークポジション自動認知システム PVチェッカー 誤投入防止システム PVレコグナイザー 最適ワークポジション自動認知システム この工程をイラスト図解 PVレコグナイザー 最適ワークポジション自動認知システム パレット上の袋の位置や高さ、傾きをカメラ画像で認識。AIによる高度画像処理でワークを3次元的にとらえ、ピンポイントで吸着リフトアップし、途中脱落することなく搬送します。 TSUKASAではメーカーとしての強みを発揮して、「フィジカルAI」によるロボットや機械の自律的制御システムの開発に取り組んでいます。 袋の持ち上げ時の吸着不良や負荷異常を防ぎます。 特長 ⚫︎「デパレタイザーロボ」での原料袋の吸着不良や負荷異常を防止。 ⚫︎3Dカメラの画像とAI解析で、原料袋の位置や高さを3次元的に認知。 ⚫︎ロボットアームによる持ち上げ時の不良発生率を確実に低減。 オプション ⚫︎袋の絵柄次第では、袋の向きも認識できる機能を搭載可能。 組み合わせ機器(参考) ⚫︎デパレタイザーロボ(DPL) 特殊吸着機構と直行座標型を採用し、迅速な袋供給を実現した自動搬送機 一覧に戻る