

Pow Vision System
PV Checker – System zur Verhinderung einer Fehlbeschickung
PV Recognizer – System zur automatischen Erkennung optimaler Arbeitspositionen
PV Checker – System zur Verhinderung einer Fehlbeschickung
PV Recognizer – System zur automatischen Erkennung optimaler Arbeitspositionen
Visuellem Erkennungssystem PowVision
System zur automatischen Erkennung optimaler Arbeitspositionen
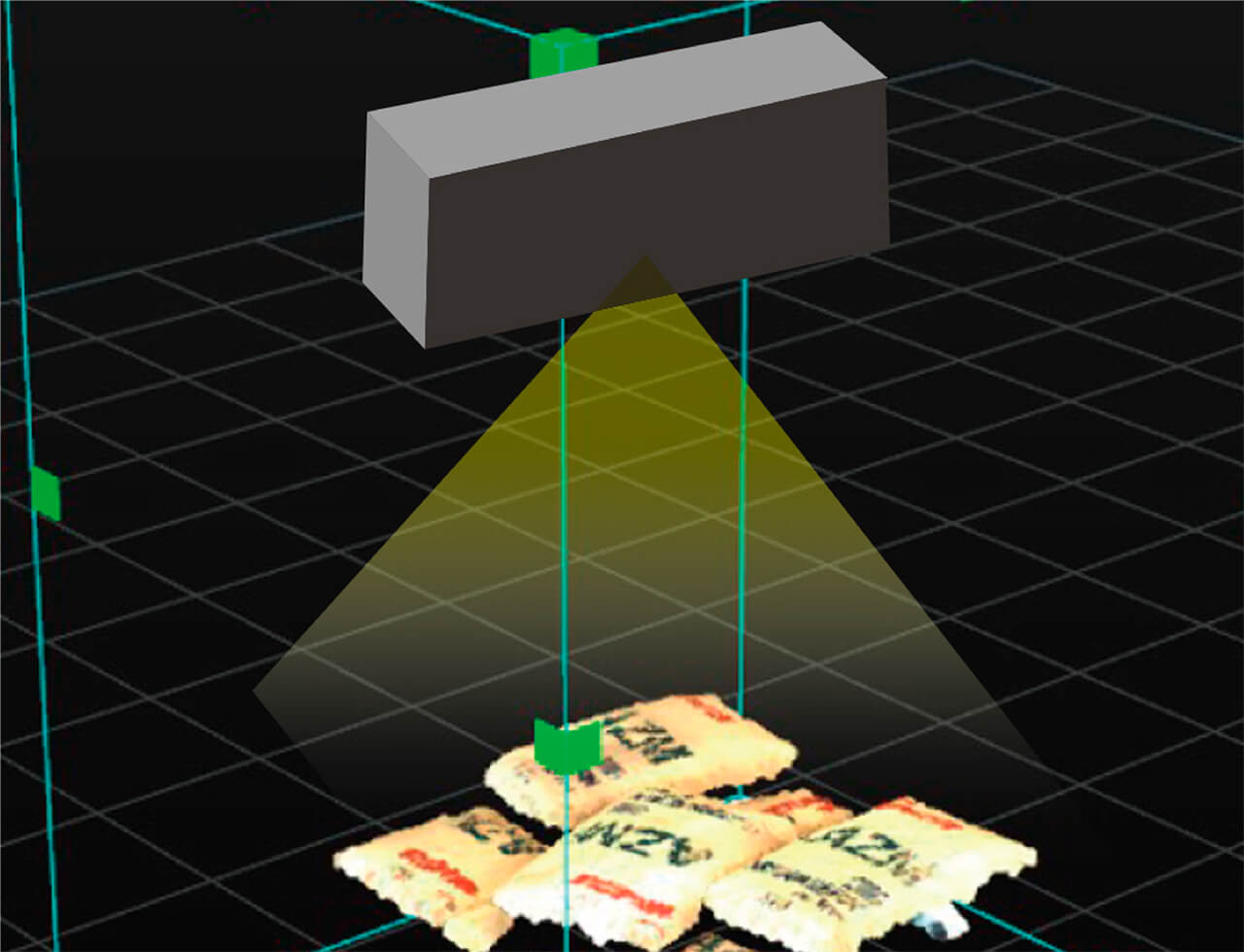
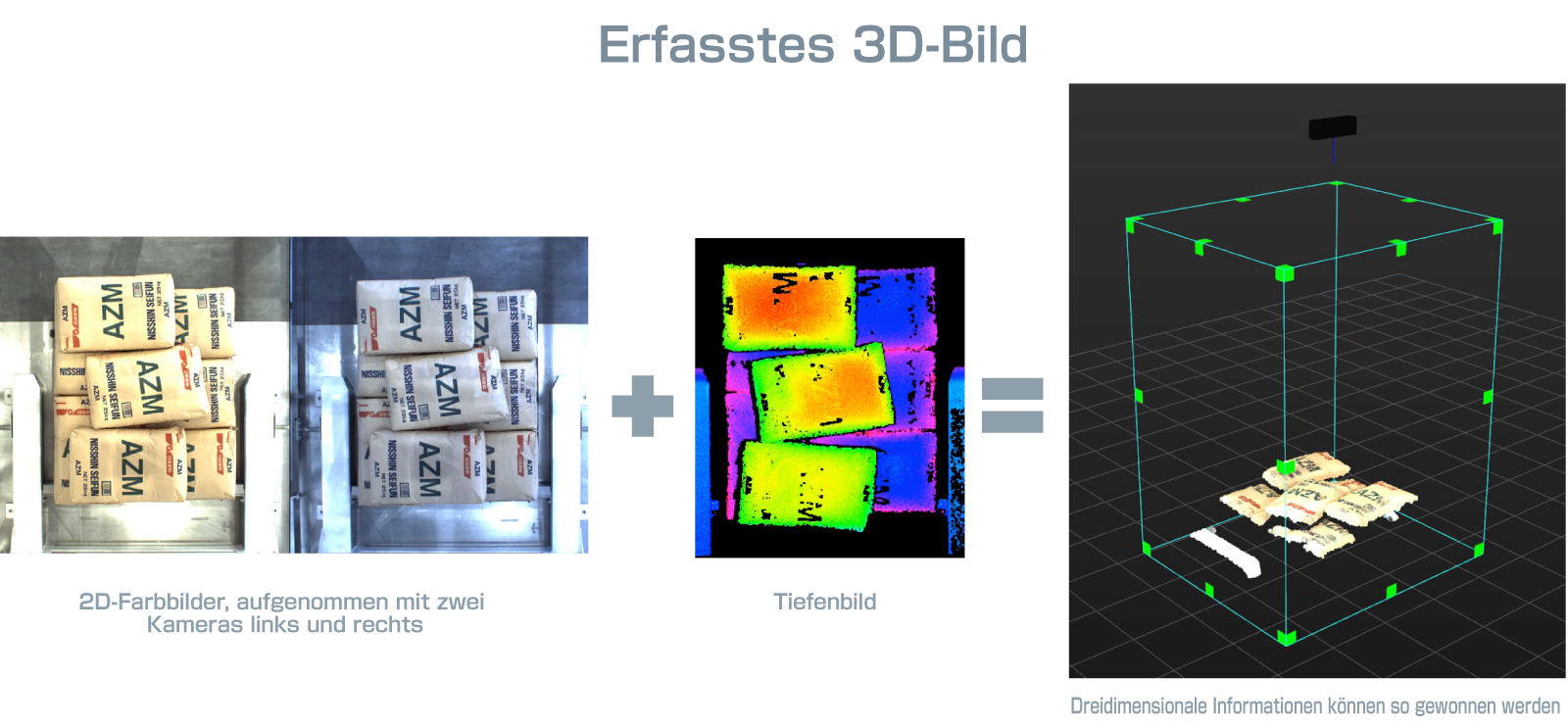
Die Position, Höhe und Neigung der Beutel auf einer Palette werden mithilfe von Kamerabildern erkannt. Fortschrittliche Bildverarbeitung mittels KI erfasst das Werkstück in drei Dimensionen und ermöglicht so ein präzises Ansaugen und Anheben, wodurch ein Herunterfallen während des Transports verhindert wird.
TSUKASA nutzt seine Stärken als Hersteller, um autonome Steuerungssysteme für Roboter und Maschinen mit „Physischer KI“ zu entwickeln.
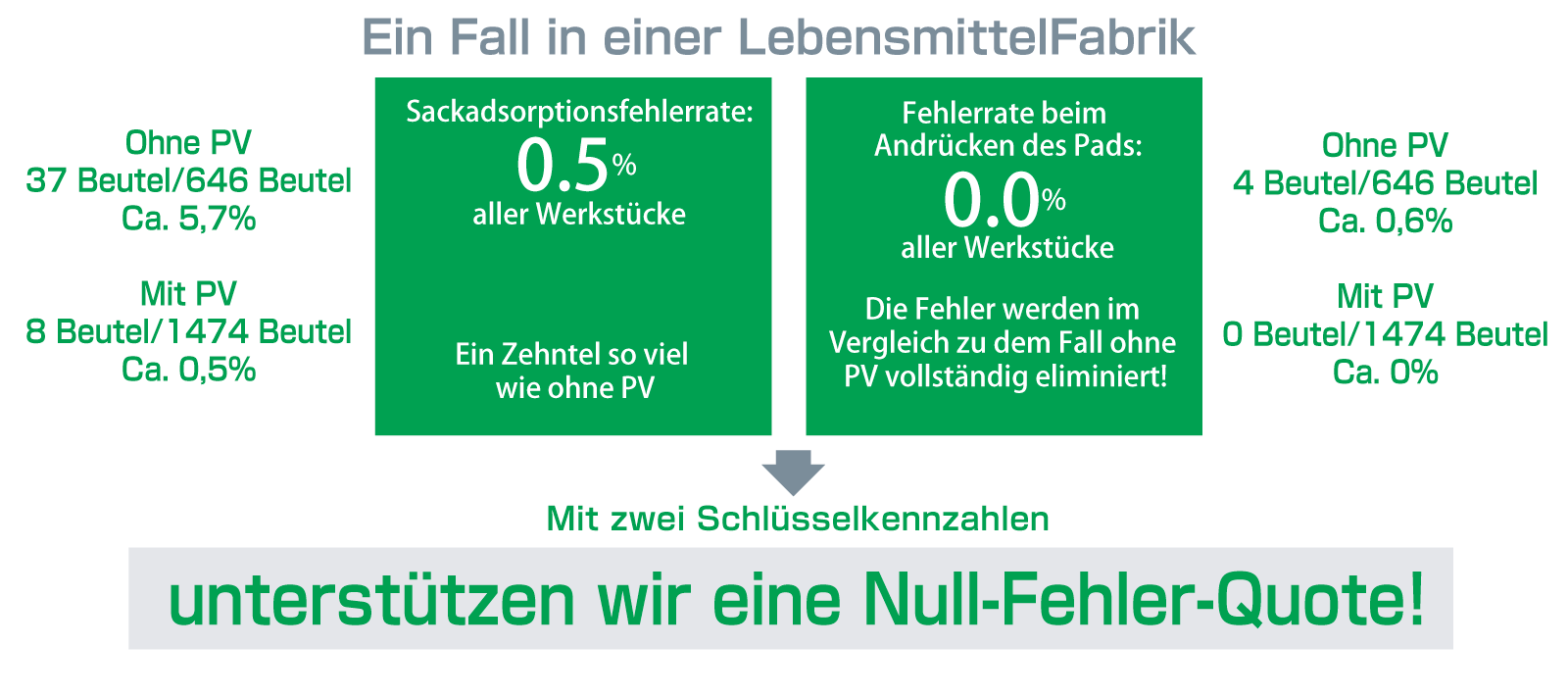
Verhindert ein schlechtes Ansaugen und ungewöhnliche Belastungen beim Anheben der Beutel.

Merkmale
⚫︎Verhindert ein schlechtes Ansaugen der Materialbeutel und ungewöhnliche Belastungen des Entpalettierroboters.
⚫︎Mithilfe der 3D-Kamerabilder und KI-Analyse werden die Position und Höhe der Materialbeutel dreidimensional erkannt.
⚫︎Verringert zuverlässig die Fehlerquote bei den Hebevorgängen mit den Roboterarmen.
⚫︎Mithilfe der 3D-Kamerabilder und KI-Analyse werden die Position und Höhe der Materialbeutel dreidimensional erkannt.
⚫︎Verringert zuverlässig die Fehlerquote bei den Hebevorgängen mit den Roboterarmen.
Optionen
⚫︎Je nach dem Aussehen des Beutels, kann das System auch mit einer Funktion ausgestattet sein, die die Ausrichtung des Beutels erkennt.
Kombinationsgerät (Beispiel)
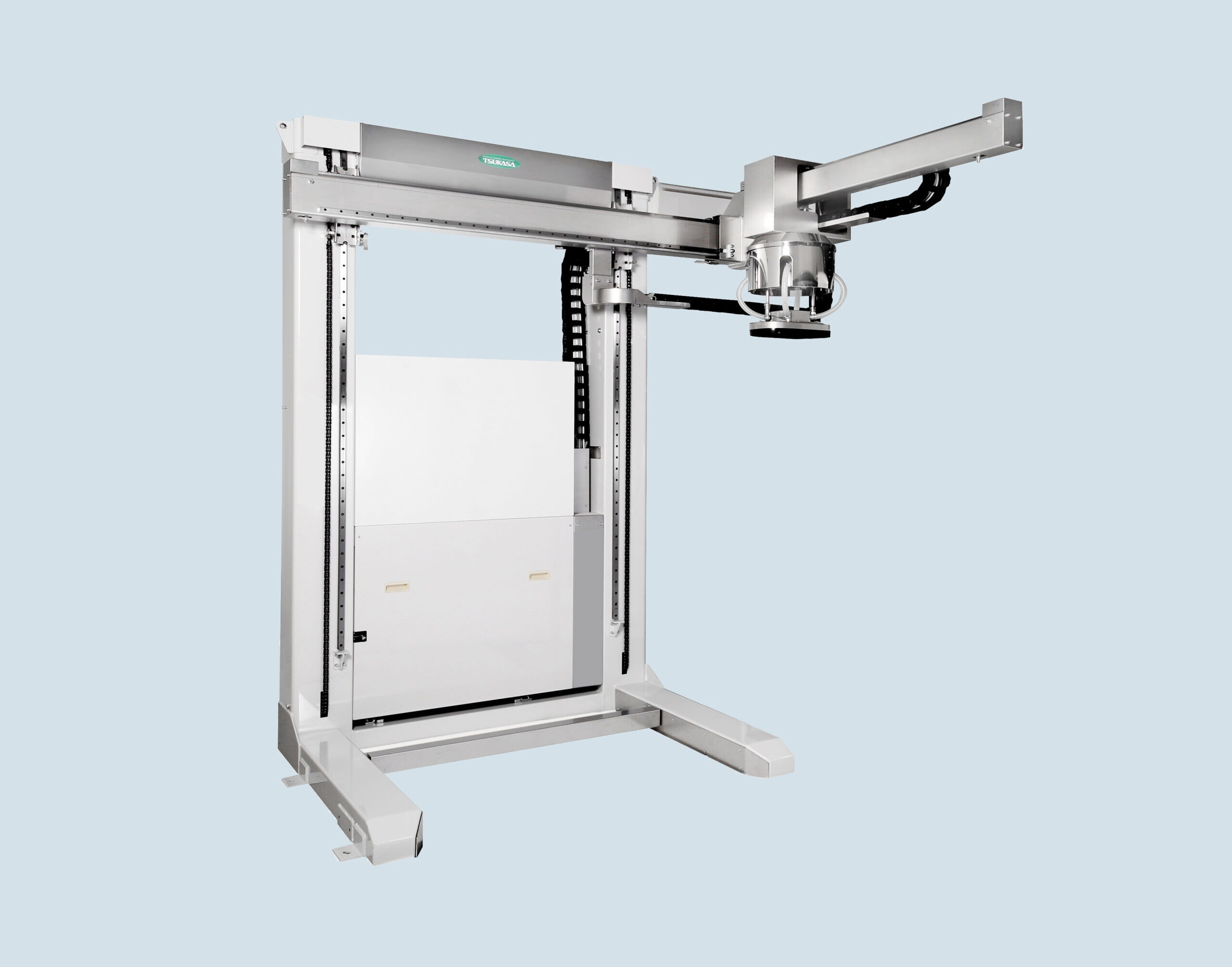
⚫︎Depalettierer Roboter (DPL)
Ein automatisiertes Fördersystem mit speziellem Saugmechanismus und kartesischem Koordinatenantrieb für eine schnelle Sackzufuhr
Ein automatisiertes Fördersystem mit speziellem Saugmechanismus und kartesischem Koordinatenantrieb für eine schnelle Sackzufuhr