

Système Pow Vision
PV Checker – Système de prévention des chargements incorrects
PV Recognizer – Système de reconnaissance automatique des positions de travail optimales
PV Checker – Système de prévention des chargements incorrects
PV Recognizer – Système de reconnaissance automatique des positions de travail optimales
Système de reconnaissance PowVision
Système de reconnaissance automatique des positions de travail optimales
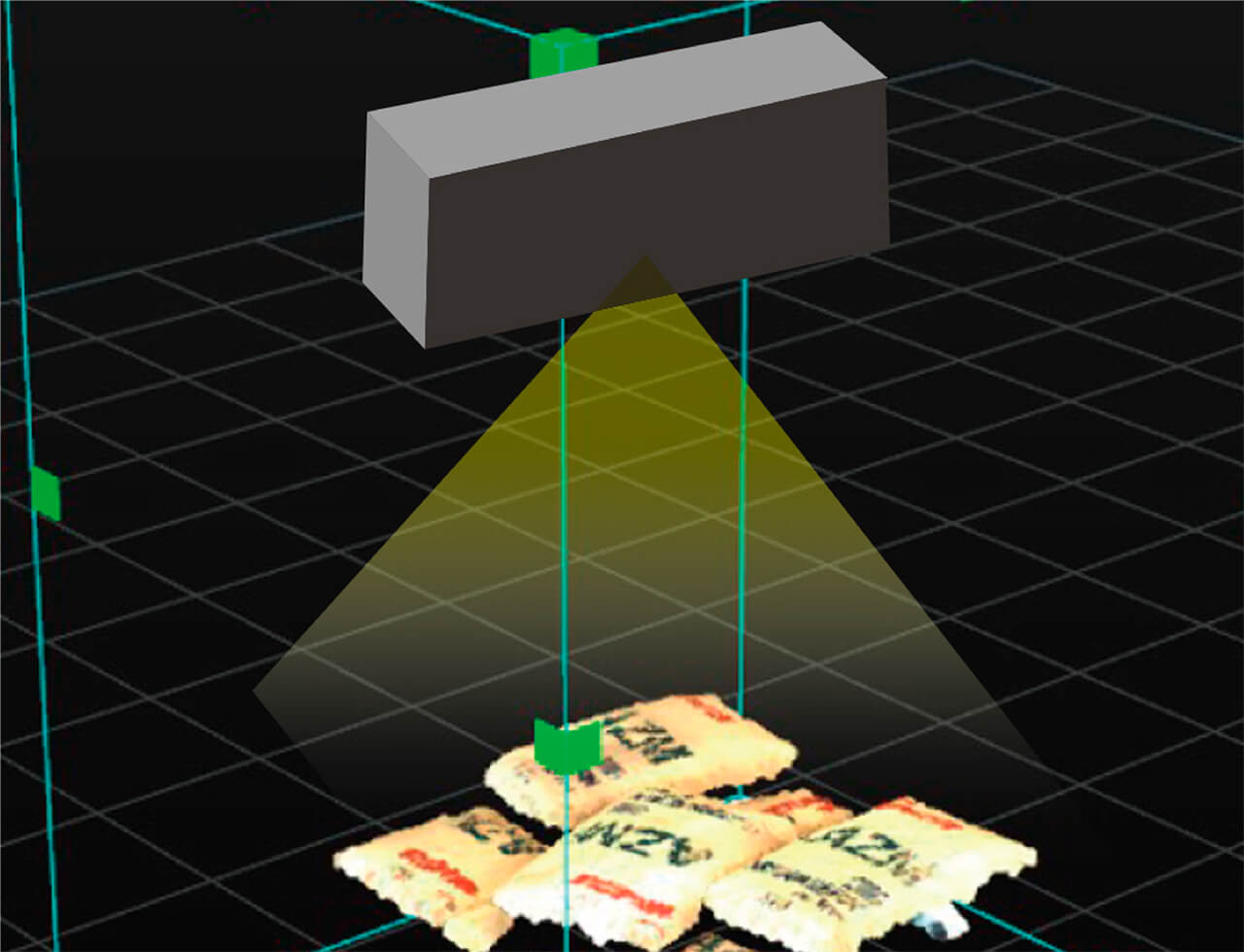
La position, la hauteur et l'inclinaison des sacs sur une palette sont reconnues à l'aide des images de la caméra. Le traitement d'image avancé par IA capture la pièce en trois dimensions, permettant un levage par ventouse de précision et l'empêchant de tomber pendant le transport.
TSUKASA mise sur son savoir-faire de fabricant pour développer des systèmes de contrôle autonomes pour robots et machines utilisant l'« IA physique ».
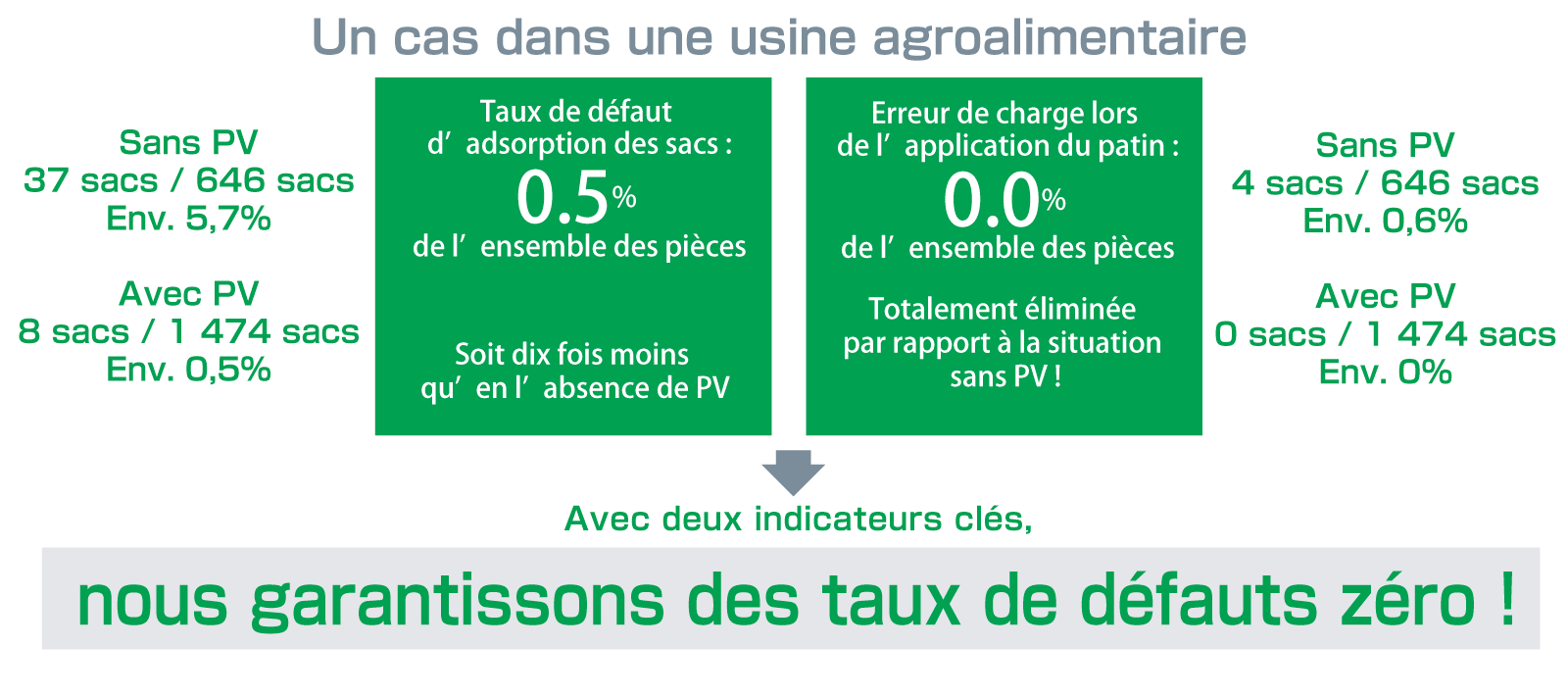
Prévient les défauts d'aspiration et les charges anormales lors du levage des sacs.

Caractéristiques
⚫︎Prévient les défauts d'aspiration des sacs de matériaux et les charges anormales sur le robot dépalettiseur.
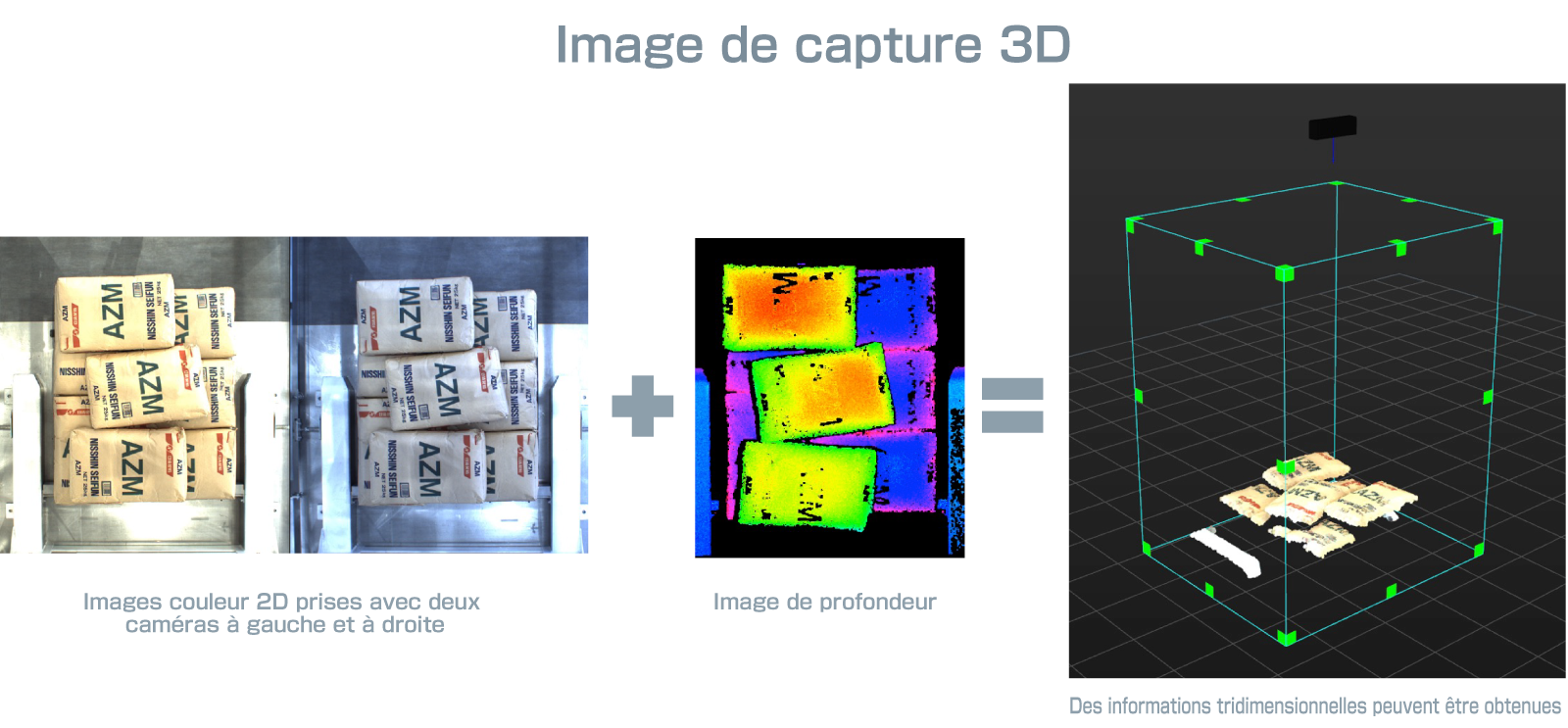
⚫︎Grâce aux images de caméras 3D et à l'analyse par IA, la position et la hauteur des sacs de matériaux sont reconnues en trois dimensions.
⚫︎Réduit de manière fiable les taux de défauts lors des opérations de levage par bras robotisés.
⚫︎Grâce aux images de caméras 3D et à l'analyse par IA, la position et la hauteur des sacs de matériaux sont reconnues en trois dimensions.
⚫︎Réduit de manière fiable les taux de défauts lors des opérations de levage par bras robotisés.
Options
⚫︎Selon le graphisme du sac, il peut également être équipé d'une fonction permettant de reconnaître l'orientation du sac.
Dispositif combiné (exemple)
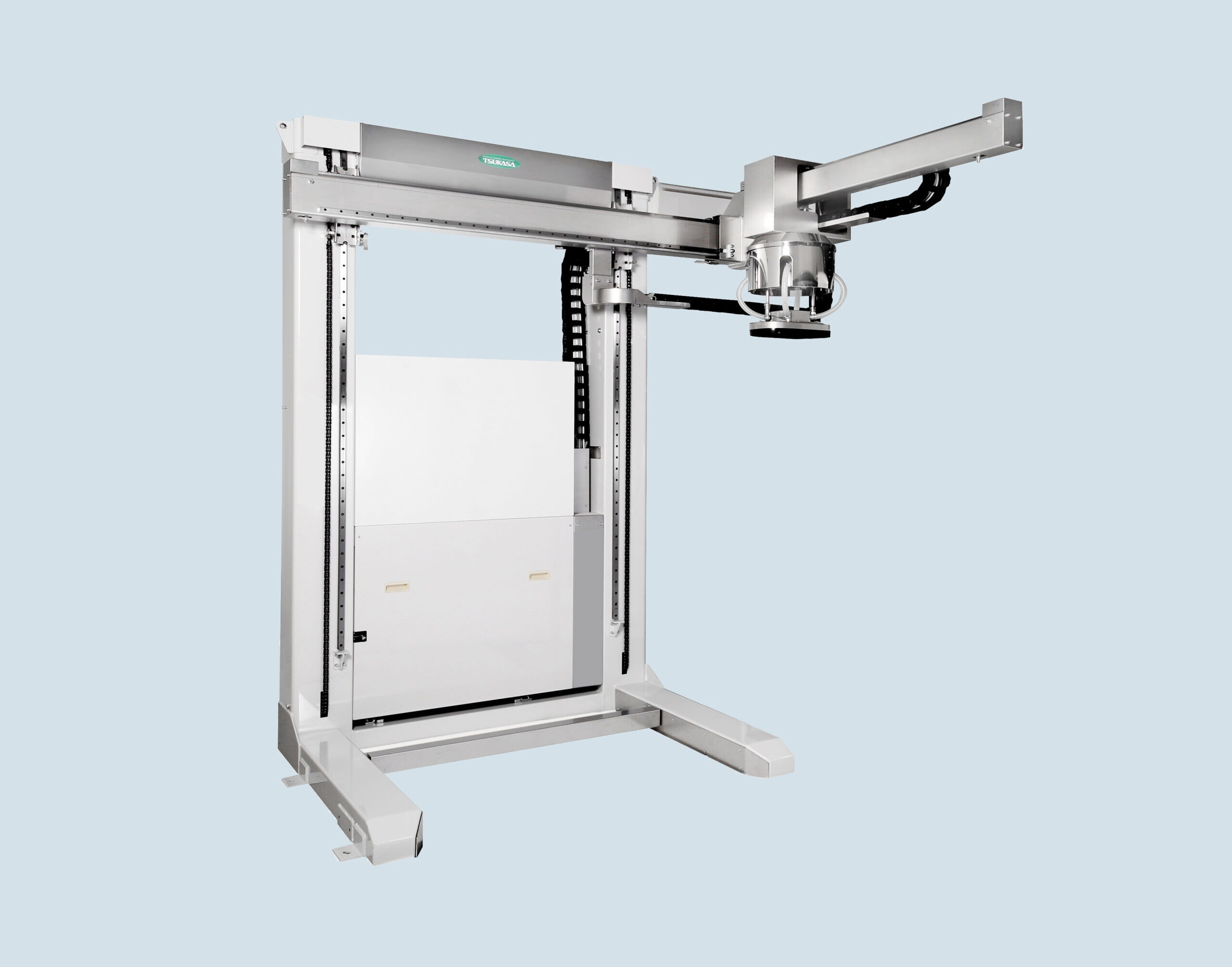
⚫︎Robot dépalettiseur (DPL)
Un système de convoyage automatisé équipé d’un mécanisme d’aspiration spécial et d’un entraînement à coordonnées cartésiennes pour une alimentation rapide en sacs
Un système de convoyage automatisé équipé d’un mécanisme d’aspiration spécial et d’un entraînement à coordonnées cartésiennes pour une alimentation rapide en sacs